Overview

Skip Steuart is the inspirational leader of the Steuart Imaging Systems team of programmers, engineers, scientists and mathematicians. Skip himself can be described as all of these things. He has worked tirelessly on the development of OTIS, an Omnidirectional, Three-Dimensional, Imaging System for over 20 years. Skip has invested substantial time and money into OTIS and he’s still 100% vested in it’s future.
Along the way there have been many accomplishments and spin off technologies. Skip’s goal has remained the same: Create the best 3D imaging system in the world!
OTIS is a camera-based scanning system that creates photorealistic 3D models of textured meshes. These models can be viewed on the web or used by popular 3D applications like Blender and 3D Studio Max. The camera-based 3D-360 system is a cost-effective alternative to laser scanning systems.
There are three parts to OTIS:
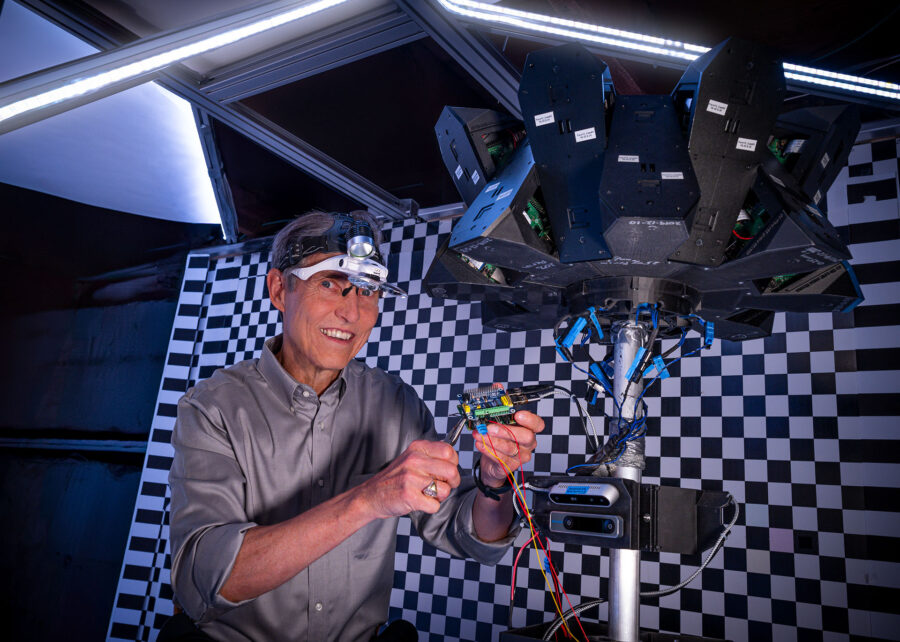
#1 The OTIS Camera
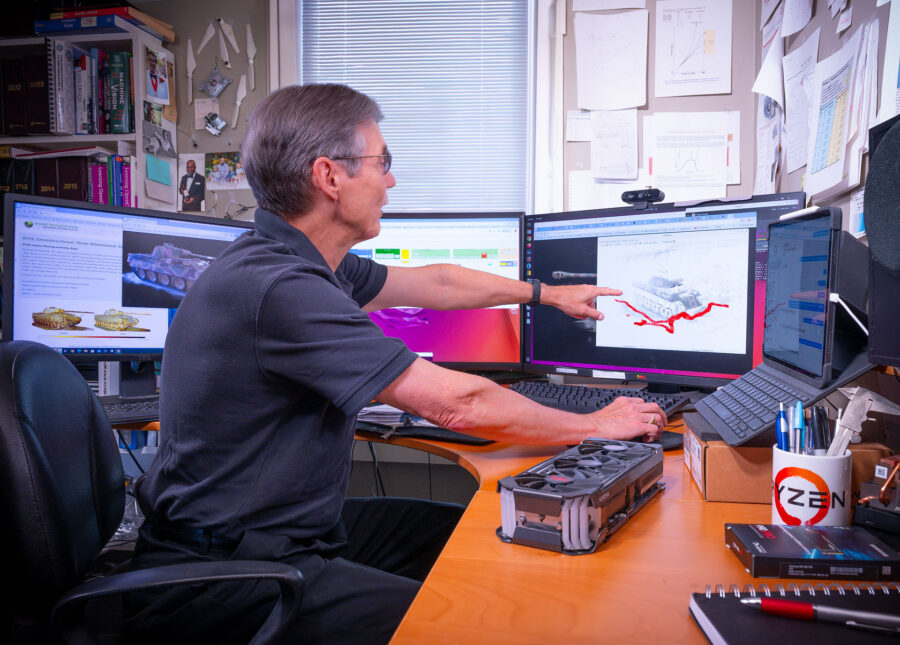
#2 The OTIS Computer
#3 The OTIS Software
There have been many prototype OTIS cameras. Each with unique arrays of sensors, boards, lenses, lasers, & lights. The OTIS cameras and lenses are custom made for the purpose of creating 3D data. The camera boards, sensors & lenses are all carefully built, assembled and tested for precision.
The computer systems used to process the data captured by the OTIS must be powerful. Capturing & processing thousands of image files and using them to create 3D models requires state-of-the-art computer systems. The Steuart Imaging Systems team builds their own custom computers that have immense CPU & GPU power. The process of creating a single 3D image and testing new code can still take days of processing time. Tests are planned carefully to fully utilize available processing time on the workstations. Every ounce of available processing speed is optimized and new technology is integrated into these systems as fast as practically possible.
There have been thousands and thousands of lines of code written and even more open source code integrated into the OTIS software. There are countless open-source connections going both ways. This is evident in the positioning on 3D processing benchmark competitions.
It’s safe to say that Skip and Steuart Imaging Systems are at the vanguard of academic research in the field of 3D imaging. The commercial applications for their work is nearly limitless. A few of the industries that could benefit from OTIS are:
– Architecture & Structural Engineering
– Entertainment: Film, Cinema & Animation
– Mapping & Geolocation
– Gaming
– Surveying & 3D Measurement
– Etc.

Steuart Systems History
2022 Mar: ETH in Switzerland ranks our 3D process #1 out of 116 teams from around the world.
2018 Jan: Begin construction of 32-camera 3D-360 prototype.
2015 Mar: Proto 5A scanner begins producing scans. This system will testbed for 5x family.
2014 Design Proto-5 family does evine sell replica watches that look real
2013 Feb: Begin enhancing Proto-4F: new calibration, GPU processing, & sub-pixel processing.
2013 Jan: Pivot on Proto-4G with FPGA & return to previous system. flawless swissreplica.is deep sea
2012 Apr: Prototye-4G: Developing FPGA replacement for Blackfin Processor. Expect 10x speedup
2011 Jan: Added a scissor jack to Prototype-4F. Now we can easily scan from different heights.
2010 Jul: Prototype-4F Final system tweaks: added battery power, 4x brighter pattern projection & 4x brighter illumination
2010 Jan: Prototype-4E BINGO! The new pattern projection system enables the best 3D reconstruction in over 18 months.
2009 Dec: Prototype-4D combines the best of 4B & 4C. how to buy and sell bad fake ladies rolex
2009 Oct: Prototype-4C adds multispectral monochrome image capture to system.
2009 July: Prototype-4B has ten cameras and upgrades system frame to more manufacturable precision machined aluminum frame.
2008 Dec: 3D-360 patent awarded in US. Patents for other countries are still pending.
2008 Apr: Prototype-4A: New prototype family based on carbon fiber frame, LED pattern projector, and two custom cameras.
2007 Jun : Prototype-3.3 upgraded pattern projection used for IEEE Paper. it replicas relogios really gold
2006 Dec: Prototype-3.0 consists of eight Canon 5Ds with Xenon pattern projector on a rigid aluminum frame.
2006 Aug: Prototype-2 consists of eight Canon 5Ds mounted on rigid aluminum frame.
2005 Dec: Prototype-1 consists of two Canon 5Ds mounted on rigid aluminum frame.
2004 Sept: Presented 3D-360 concept at National Defense Industry Association (NDIA) even on Emerging Technology in Virginia
2003 Jun: Filed patent for Omnidirectional Stereoscopic Camera System: the 3D-360 ok replica breitling tourbillon bezel tight
2002 Form Steuart Systems LLC and begin collaborating on photorealistic 3D scanning & model creation
Before Steuart Systems
1999 Started using Apple’s QTVR to make panoramas for early computer Virtual Reality (VR). I call 360 degree panorama 2D-360.
1987 to 2002: Skip Steuart was systems architect responsible for integrating computer and communications systems for geographically disperse 500+ person company. swiss eta movement https www.swissreplicas.to